相机模型
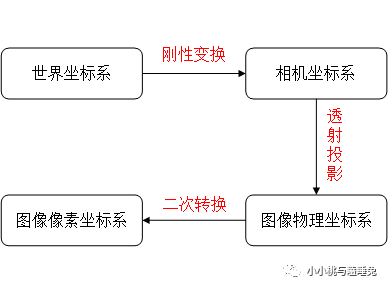
简单的说,摄像机成像过程的实质是4个坐标系的转换,首先,空间中的一点由世界坐标系转换到相机坐标系,此时的点仍处于空间;然后将空间的点投影到成像平面上,完成相机坐标系转换到图像物理坐标系,此时的点已经投影到成像平面,是个二维点;最后成像平面上的点转换成图像平面,此时点参考的坐标系变为图像像素坐标系。
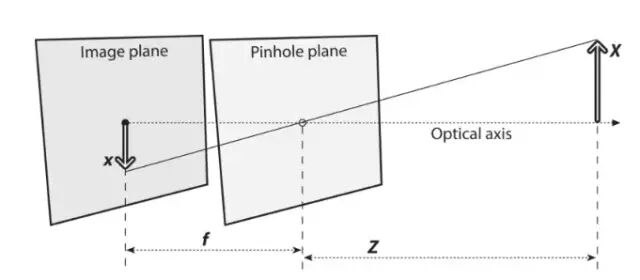
我们可以看最简单的相机模型:针孔模型,针孔模型,如下图,f是相机焦距,Z是相机到物体的距离,X是物体的长度,x是图像平面上的物体图像。根据相似三角形可以得到公式:
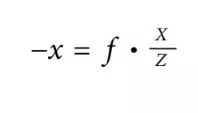
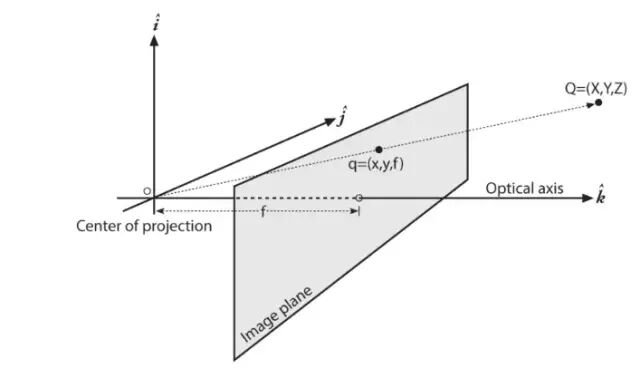
对上述针孔模型作等价转换,交换针孔和图像平面,原本针孔介于物体和物体图像之间,图像里物体是倒立的(故上式带负号),现在物体图像介于针孔和物体之间,此时针孔中的点被理解为投影中心,这样,每一条光线从远处物体的某个点出发,到达投影中心,与新图像平面相交的点就是投影点。光轴与图像平面的交点被称为主点。值得注意的是,转换后的针孔模型是其数学形式更加简单,但这种典型的数学抽象无法在物理上构建。此时的公式为上式去掉负号。
由于工艺的限制,成像装置很难做到主点在中心位置(拿着镊子和胶水以微米级别的精度安装或许可以实现),因此,芯片的中心通常不在光轴上。我们对投影屏幕坐标中心可能的偏移(对光轴而言)进行建模,即物理世界的点Q,其坐标为(X, Y, Z),投射到成像装置上的某个像素点,有:

其中,cx、cy是坐标中心偏移引入的两个新参数,fx、fy是引入的两个不同的焦距,此处焦距fx实际上是透镜的物理焦距长度与成像装置每个单元尺寸Sx的乘积(Sx的单位为像素/每毫米,f的单位是毫米),这样做的目的是,Sx、Sy以及物理焦距 f 均不能在相机标定过程中直接测量,只有组合量fx = f * Sx,fy = f * Sy 可以直接计算出来,避免拆除相机去直接测量其部件。求得的(xscreen, yscreen)是像素坐标。
射影几何基础
将物理世界中坐标为(X, Y, Z)的一系列物理点Q映射到投影平面上坐标为(x, y)的点的过程叫射影变换。采用这种变换一般要使用齐次坐标。
齐次坐标:齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示(例如:x, y, z 变成x, y, z, w),其额外限制是任意两个点的值成比例时即为等价点。
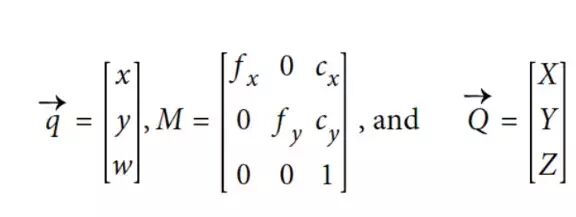
用一个三维向量q = (q1, q2, q3)来表示平面上的点,由于所有点在投影空间中的比例值是相同的,因此我们可以通过除以q3得到实际的像素坐标值。这样一来,便允许我们将定义相机的参数(如fx, fy, cx, cy)重新排列为一个3 * 3的矩阵,称为相机的内参矩阵。
将物理世界中的点投影到相机上,可以用下式简单表示:
10.22
参考:
learning opencv3
https://www.jianshu.com/p/887dd060ea99


